







The humanoid robotics industry faces an interesting challenge: actuator designs lack standardisation.
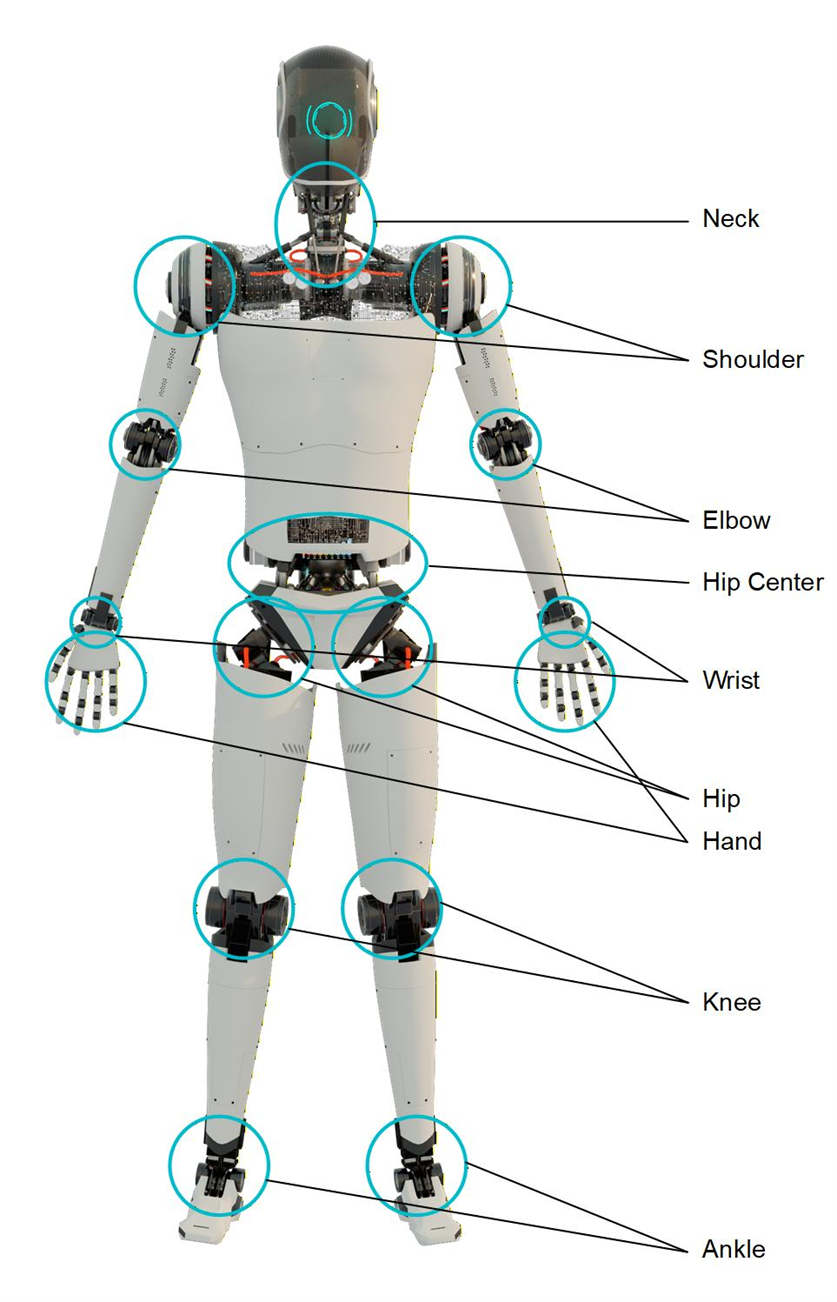
Unlike industries with established architectures and interfaces, the design of a typical humanoid robot actuator (common locations shown in Figure 1) requires varied approaches depending on application requirements, form factors, and performance targets. The diversity in design approaches requires that OEMs and system integrators explore multiple strategies for reducing form factors and improving efficiency and performance, which can significantly increase design complexity and extend development timelines.
In this article, we discuss how advances in high-bandwidth motor control, gallium nitride (GaN) power stages, and Edge artificial intelligence (AI) are enhancing actuator capabilities by providing flexibility in the absence of industrywide standards. We also briefly discuss space constraints and functional safety considerations.
High-bandwidth motor control
Humanoid robot motion quickly becomes unstable, inefficient, or unsafe without precise and responsive control of position, speed, and torque. High-bandwidth motor control helps achieve smooth, human-like motion by allowing algorithms executed by the motor controller and embedded processors to continually adjust actuator behaviour in response to changing loads and external forces.
Delivering high-bandwidth motor operation depends on microcontrollers (MCUs) designed for real-time control, such as C2000 MCUs, which support fast execution of current, speed, and position control loops with deterministic low latency.
Optimising the dynamic performance of the humanoid motion system requires high-loop bandwidths such as:
- Current loop bandwidth exceeding 5kHz for rapid torque response
- Velocity control loop bandwidth exceeding 1kHz for smooth motion tracking
- Position control loop bandwidth exceeding 1kHz for precise joint positioning
Achieving these bandwidths also requires that the drive network deliver position and speed commands from the MCU to each joint with minimal and deterministic latency. EtherCAT supports motion update rates of 4 to 32kHz and 100Mbps of link bandwidth, keeping command delivery aligned with the inner-loop bandwidths that real-time MCUs require across all joints simultaneously and without degradation as joint count increases.
System-level efficiency and thermal performance
As control bandwidth increases across multiple joints, power and thermal demands rise, making efficiency an important design consideration. Humanoid robots may contain dozens of actuators running continuously, and the smallest inefficiencies at the joint level can accumulate quickly, generating excess heat that limits operating time and constrains performance.
Improving motor-drive efficiency with advanced power technologies such as GaN addresses both efficiency and thermal performance. GaN power stages can achieve >99% efficiency compared to 95% for silicon-based designs, representing a significant improvement in power density and thermal management. Engineers can implement switching frequencies >100kHz by using GaN, which reduces passive component size while maintaining low electromagnetic interference.
Engineers designing for humanoid robots should target power densities above 5W/cm³ at the actuator level, with continuous power ratings scaled according to joint requirements. Finger actuators operate in the 5 to 20W range while shoulder and elbow joints typically require 100 to 750W of maximum continuous power. Half-bridge GaN motor driver power stages with an integrated driver help engineers achieve these high-power densities.
It’s also possible to moderate thermal behaviour through system-level integration. Integrating control, sensing and power management can improve overall efficiency at the joint level, which becomes increasingly important as humanoid robots scale in complexity.
Edge AI enhancement
Edge AI plays an important, albeit supporting role at the actuator level by monitoring and protecting joint-level operations. By analysing current, torque, and load, AI can identify early indicators of wear or abnormal behaviour, a predictive maintenance capability that flags potential failures before they affect system operations.
Deploying Edge AI at the actuator requires lightweight neural-network architectures designed to compensate for the compute, memory, and latency constraints of real-time MCUs. In motion systems, feedback signals like phase current, bus voltage, and position and velocity measurements are processed by an Edge AI model to monitor system-level issues like early motor faults signs and bearing or reduction-stage degradation. Data captured during system monitoring can be used to support the fine-tuning of control and diagnostic parameters through machine learning. This capability helps preserve dynamic performance and consistency despite wear, drift and changing operating conditions, which is important as components age.
Also, Edge AI supports local protection functions. By estimating torque and load conditions in real time, a robot’s actuators can detect the approach of operating limits and take protective action, like limiting output, to help prevent damage. These capabilities support safer interactions between humanoid robots and humans.
Implementing accompact actuator design
Space constraints present another fundamental challenge. Humanoid joints need to deliver high torque and fast response within compact physical envelopes.
Achieving human-scale form factors requires high power density. For example, the ideal configuration for a humanoid robot’s elbow joint is around 50 to 100mm in a diameter.
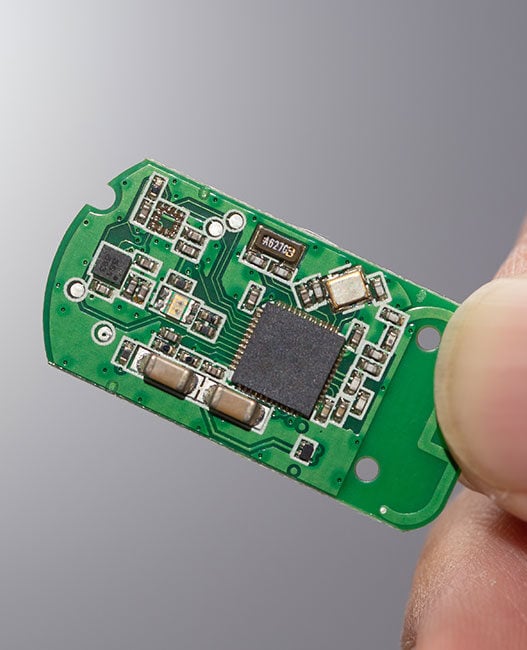
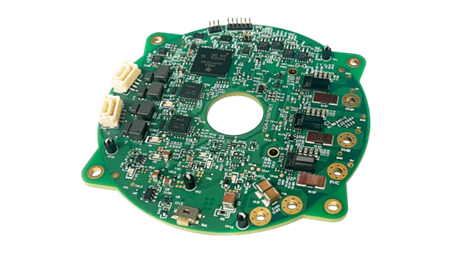
Designing this level of compactness still requires integration. Actuator designs must incorporate logic, sensing, and communication within a limited footprint while still maintaining acceptable thermal behaviour. As a result, design choices will vary depending on joint function, size, and available space. Figure 2 shows an example of a compact test board for a 48V 1kW robot joint motor control system with a 70mm diameter.
Complying with functional safety requirements
Currently, there are no set functional safety standards specifically for humanoid robots, although there are established standards for collaborative and industrial robots. Standards organisations will very likely develop safety specifications for humanoid robots in the future as market demand and viable use cases continue to grow.
Humanoid robot developers should perform thorough assessments of their current design approaches to reduce future modification costs until safety requirements are defined. Standards such as ISO13849 or the IEC 61508 can provide insight into potential future requirements.
Conclusion
Effectively addressing these challenges requires a systematic approach that begins with defining safety requirements early in the design phase, incorporating rigorous testing and validation protocols, and leveraging safety-certified MCU platforms such as Texas Instruments AM2612 and F28P650 MCUs to ensure compliance with human-robot interaction safety standards.
Visit TI at embedded world: 3A-131
This article originally appeared in the March’26 magazine issue of Electronic Specifier Design – see ES’s Magazine Archives for more featured publications.