







Closer human-robot interaction can help increase industrial efficiency, but it comes with a number of challenges, including ensuring safety.
The augmentation of robotic autonomy can contribute to increased operational efficiency, especially within collaborative human-workforce environments. However, as robots look to move from static and well-guarded environments to working closely alongside humans, a number of new technical challenges occur.
Engineers creating autonomous robots need to combine the autonomy and intelligence of robotics with inherent design strategies that can prevent or minimise the risk of harm. In this article from Mouser Electronics, we will explore the technological and regulatory cornerstones that help engineers create safe, reliable, and standards-compliant autonomous robots ready to support the next generation of smart industry.
From industry 4.0 to 5.0: forging human-robot collaboration
Robotics within the Industry 4.0 model became increasingly agile, supporting integration in factory cloud control systems, predictive maintenance, and even intelligent decentralised decision-making. However, where Industry 4.0 was built on the concept of new functionality and interconnectivity, Industry 5.0 is evolving beyond automation efficiency to place human-machine collaboration at its core.
In this new phase, autonomous robots are expected not merely to work for or around humans but to collaborate with them, sharing tasks and space in an orchestrated partnership. From collaborative robot (cobot) arms used in electronics assembly to autonomous guided vehicles (AGVs) navigating logistics centres (figure 1), industrial robots are already in closer proximity to their human counterparts than ever before, and this trend is only set to continue.

Figure 1: AGVs are now commonplace in most modern distribution centres (source: kinwun/stock.adobe.com)
Market analyst Statista predicts a 33% compound annual growth rate (CAGR) for the cobot market between 2020 and 2030, seeing the market size grow from $475 million in 2020 to approximately $8 billion in 2030.[1]
Although this development presents significant opportunities, the increased accessibility of new robotic designs presents novel challenges. For robotics engineers, the focus is no longer simply one of uptime or throughput – it is about building inherent safety that allows people to trust and work alongside robots.
Strategies for safe autonomy
Unlike static safety systems, autonomous or collaborative robots must remain vigilant, adaptive, and fail-operational, often in complex, unstructured environments. By unifying the following strategies, engineers can develop autonomous robots that behave safely, even in evolving industrial conditions.
Identify and Follow Standards
International standards help to define essential safety parameters for autonomous and collaborative industrial robots, addressing power/force limits during human-robot interaction, along with risk mitigation and acceptable contact forces.
For example, ISO 13849-1 outlines safety requirements for control systems, using Performance Levels (PL) from ‘a’ to ‘e’ to measure safety function reliability and guide redundant system design. The IEC 61508 standard provides a complete lifecycle for the functional safety of electrical, electronic, and programmable electronic (E/E/PE) systems, defining safety integrity levels (SIL 1-4) and methodologies such as failure modes, effects, and diagnostic analysis (FMEDA) for systematic risk analysis, design, and validation of safety functions.
To avoid costly rework and manage project expenses effectively, engineers must incorporate compliance from the project’s outset, including mapping relevant standards and conducting risk assessments with the initial design. Early engagement with functional‑safety experts and certification bodies can also help to validate safety architectures and draft FMEDA plans.
Use safety-rated components
Components providing certification or a framework to support system certification help engineers to more easily achieve the functional safety level that their application demands. Furthermore, safety features like hardware redundancy, error correction, and lockstep cores built into microcontroller units (MCUs) simplify the development of safety-critical hardware and firmware, leading to greater confidence and faster certification.
Components like Texas Instruments’ TMS320F280015x MCU family, which come with supporting documentation, will be available to aid IEC 61508 system design and feature dual 32‑bit C28x central processing units (CPUs) operating in lockstep. Lockstep is an error detection technique that uses two processors running identical instructions in parallel, with any discrepancy resulting in an immediate, controlled system shutdown.
Sensors can also include chip-level redundancy. For example, some sensors are available as dual-die designs, which integrate two identical sensors into a single package, thus providing a higher level of inherent safety.
Deploy heterogeneous sensing
To manage the complexity of highly dynamic industrial environments that can offer an obscured line of sight, heterogeneous sensing strategies combine multiple sensor modalities, each compensating for the limitations of the others. For example, light detection and ranging (LiDAR) offers high-speed, precise distance measurement and is ideal for mapping and obstacle avoidance. Meanwhile, image sensors provide rich contextual data, essential for visual interpretation of the robot’s surroundings. Furthermore, time-of-flight (ToF) sensors can be added to provide rapid 3D depth mapping, enabling the robot to discern the distance to multiple objects in a scene in real time.
Deploying a range of visual sensor types in tandem helps to reduce sensing ‘black spots’ while also creating redundancy in the event of a sensor failure. This layered sensor fusion approach improves the reliability of the robot’s environmental awareness, ensuring safe pathfinding and collision avoidance even in unpredictable or cluttered workspaces. Moreover, it supports the real-time simultaneous localisation and mapping (SLAM) techniques that underpin modern mobile robotics.
Leverage digital twins
Digital twin models are rapidly emerging as a key tool that can augment these safety strategies by simulating the physical robot in a virtual environment. This enables engineers to test responses to edge cases or rare failures. While supplementary, this approach offers valuable foresight during the system validation phase and allows for enhancements in overall operational efficiency.
Hardware focus: critical products for safer robots
From real-time perception and control to the execution of fail-safe routines, hardware innovation plays a central role in enabling autonomous systems to operate safely alongside humans in complex industrial environments. Mouser Electronics offers a broad portfolio of innovative solutions from globally recognised suppliers that deliver precision, reliability, and robustness under demanding conditions. This extensive selection includes cutting-edge perception technologies that can help robotics engineers create highly accurate and reliable heterogeneous sensing systems.
Reliable distance sensing
The SF45‑B microLiDAR from LightWare combines a compact form factor with a highly configurable scanning capability, making it an ideal primary sensor for obstacle detection and SLAM in collaborative and autonomous robots. The small and lightweight scanning device features a measurement range between 0.2m and 50m, ensuring both near‑field human detection and far‑field environment mapping can be achieved using a single device.
LightWare has ensured that the device is incredibly flexible in operation to allow it to support a wide number of robot designs and applications. Engineers can adjust its field of view from a narrow beam to a full 320° sweep, and the configurable interfaces—including USB, UART, and I²C—allow for seamless integration into Robot Operating System (ROS)-based controllers.

Figure 2: LightWare’s SF45-B is a ready-to-integrate LiDAR solution in an incredibly compact package (source: Mouser Electronics)
This functionality, coupled with a sampling rate of 5,000 readings per second, enables the SF45-B to provide real-time data to a robot’s safety logic layer for collision avoidance and dynamic speed reduction, thus ensuring fail-safe operation in environments with unexpected human movement.
High‑fidelity visual awareness
Complementing LiDAR’s depth information, the onsemi AR0234CS image sensor delivers 2 MP resolution with a 1/2.6″ global shutter pixel array of 1920 × 1200, capable of capturing full‑frame images at up to 120fps without motion blur. This high-speed and motion‑free capture is essential in dynamic workcells, where cobots must distinguish fast‑moving human limbs from static obstacles to maintain safe interaction.
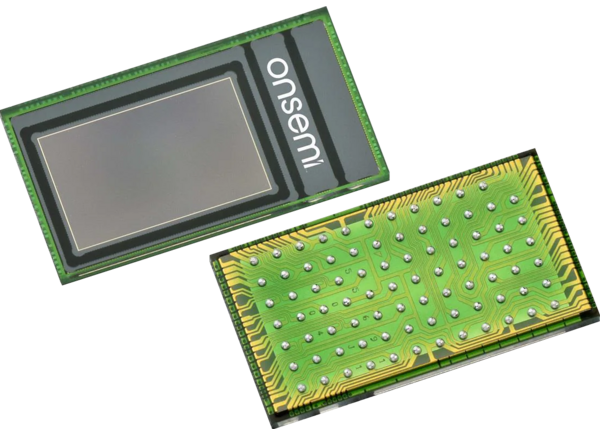
Figure 3: onsemi’s AR0234CS features a global shutter design that ensures all details are captured in every single frame (source: Mouser Electronics)
The AR0234CS provides clear imagery even under challenging lighting transitions common in industrial facilities, such as passing forklifts casting shadows. The sensor’s programmable features, including windowing, row/column-skip, and pixel‑binning, enable engineers to dynamically balance image quality and processing load.
In applications such as autonomous mobile robots (AMRs), which are increasingly operated close to humans, high-framerate image sensors can be deployed alongside more energy-intensive technologies, like LiDAR, to optimise performance. Together, these sensing modalities enable adaptive power strategies, such as reducing LiDAR scan frequency when the image sensor confirms a static environment. This allows the system to maintain a high level of safety while improving the overall energy efficiency of battery-powered autonomous robots.
Conclusion
As autonomous robotics becomes more intertwined with human-operated environments, safety must be deployed and addressed not as an afterthought but as a core design mandate from a project’s inception. By integrating fail-safe mechanisms, sensor diversity, compliance with safety standards, and reliable hardware components, engineers can deliver robots that are not only intelligent and efficient but fundamentally safe.
The value of in-house engineering at Mouser Electronics
Meet Aly Barakat, Technical Marketing Engineer, EMEA, at Mouser Electronics. Working as an engineer within Mouser’s technical marketing team, Aly continually engages with the engineering community to better understand the challenges they face. Alongside his role at Mouser and his studies towards a master’s in electronic engineering, he develops Mouser’s exhibition demonstrations, including the autonomous mobile robot (AMR) demo, which he developed in collaboration with onsemi.
The AMR demo integrates a wide range of sensors to ensure safe operation. These include 2D light direction and ranging (LiDAR) for area scanning, ultrasonic sensors for transparent object detection, and both stereo and mono cameras for depth and visual tracking. Among these sensors is the onsemi AR0234CS digital image sensor, which supports ArUco marker detection and navigation.
The demo processes sensor data using the NVIDIA Jetson Orin module, enabling real-time sensor fusion. This is vital to reconcile the strengths and weaknesses of individual sensors and ensure redundancy in safety-critical functions. For example, ultrasonic sensing can compensate for where LiDAR might miss transparent surfaces. This layered approach is essential for engineers developing autonomous robots. Accurate localisation, mapping, and predictive collision avoidance all depend on reliable perception. Even digital twins – crucial for developing and testing AMRs – rely on real-world sensor data to create and refine operational maps.
In-house engineering projects like this AMR demo are crucial to how Mouser operates as a distributor. By creating real-world demonstrations for select trade shows, Mouser helps connect engineers to solutions from leading electronic manufacturers in context. But more importantly, it brings Mouser closer to the technical problems engineers face – in this instance, building safe autonomous robots – and allows the company to explore how its ecosystem of suppliers can help solve them.
About the author:
By Mark Patrick, Director of Technical Content, EMEA, Mouser Electronics
[1] https://www.statista.com/statistics/1239304/size-of-the-collaborative-robot-cobot-market/









