




As vehicles continue their transformation from purely functional machines into connected, software-defined environments, the idea of the car as a ‘third space’ is gaining traction. No longer just a means of transport between home and work, the modern vehicle is becoming a personalised place for calls, media, and relaxation. Audio sits at the centre of this shift, creating user experiences that differentiate products, drive option selection for car-buyers at purchase, and then delight owners after delivery.
At a system level, these experiences rely on large numbers of loudspeaker channels throughout the vehicle to deliver immersive audio reproduction of spatial content and personalisation of audio content for each seat. Microphones throughout the cabin enable telephony, in-cabin communication, and noise cancellation. Connecting this array of audio transducers to the In-Vehicle Infotainment (IVI) computer requires a digital network to keep the quantity of wiring manageable. Modern vehicle architectures often use a unified Ethernet network for connectivity of multiple functional domains, not only IVI but body control, advanced driver assistance systems and chassis control. Ethernet ‘Audio Video Bridging’ (AVB), now part of IEEE 1722, enables use of the vehicle’s Ethernet multi-function network to solve the connectivity challenge of next-generation in-vehicle audio systems.
Automotive audio networking has long leaned on a convenient assumption: AVB latency is “about 2 milliseconds.” That figure dates to the earliest AVB standards work in 2009, originally defined to support commercial audio systems with up to 7 switch hops, 100 Mbit/s link speeds, and worst‑case network loading. While still valid as a conservative upper bound for some use cases, this assumption underestimates what today’s in‑vehicle Ethernet networks can deliver, and what next‑generation in‑cabin experiences demand in practice.
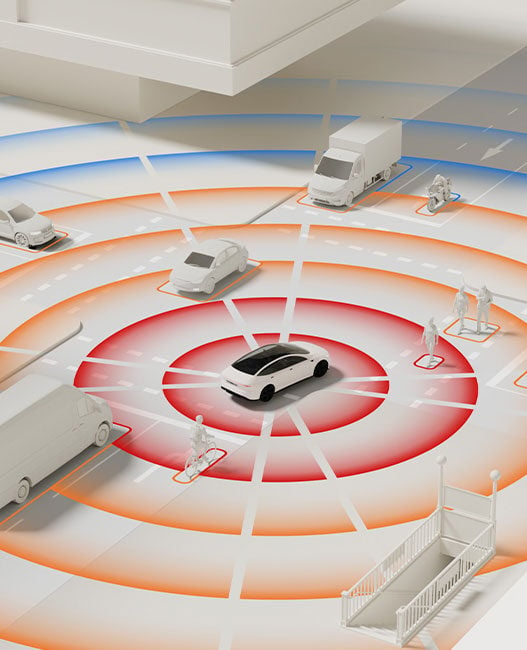
Road Noise Cancellation (RNC) audio systems challenge this assumption. Especially in electric vehicles (EVs) where the absence of engine noise exposes low‑frequency road noise, active cancellation is replacing heavy, bulky passive acoustic materials. RNC relies on accelerometers and microphones feeding real‑time data to DSP algorithms that generate anti‑noise through the cabin loudspeakers. For RNC to work at all, the electronic signal path must be faster than the physical acoustic path from the road to the occupant’s ear.
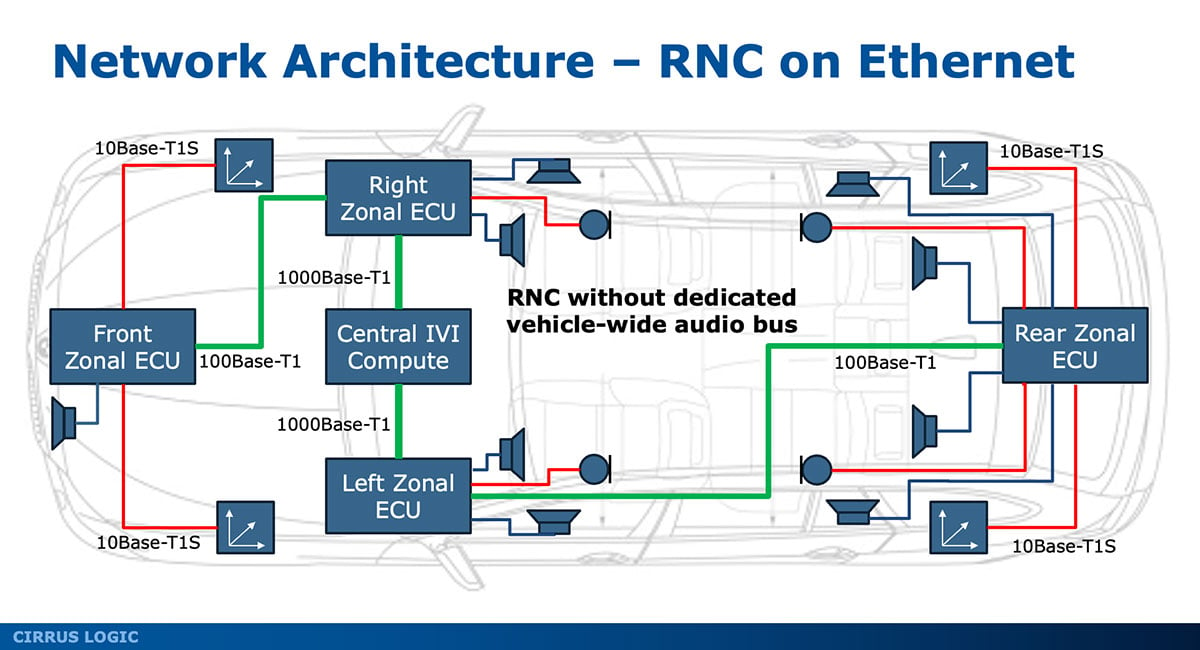
When realistic processing delays are accounted for, the available communications budget for RNC can shrink to 300 microseconds per link or less, an order of magnitude lower than traditional AVB expectations. At first glance, this seems beyond what a shared vehicle network can support. This has typically led to the use of dedicated, proprietary bus systems for audio connectivity throughout the vehicle, in addition to Ethernet connectivity. But modern automotive Ethernet and Time-Sensitive Networking (TSN) technologies offer a way to unify audio connectivity for RNC, reducing cabling and cost.
With fixed topologies, high‑speed links and a small number of maximum-priority audio channels, worst‑case network latency is dominated less by queuing delays and more by the transmission time of a single frame of lower-priority conflicting traffic. On gigabit links, that delay is under 20 microseconds. Lab measurements and analytical models both show that ultra‑low‑latency, low‑bandwidth AVB streams can coexist comfortably with Ethernet traffic from other in-vehicle domains, even under significant network load. This can be achieved using widely-accepted and supported automotive TSN switch features such as Strict Priority Queueing and either the Credit-Based Shaper (CBS) or Asymmetric Traffic Shaper (ATS), without requiring explicit scheduling techniques that may be difficult to configure and manage in an automotive network.
Alongside the latency of the network path, the AVB endpoint is a critical contributor to overall audio latency. Given the prevalence of computers and the default assumption of a 2ms latency budget, AVB endpoints have often been implemented in software. On multi-purpose compute platforms, these endpoints can not only introduce hundreds of microseconds of delay on their own, but the AVB software’s severe real-time execution requirement can complicate the software architecture. By contrast, a dedicated hardware AVB IC may have a latency of single-digit microseconds and remove the complexity of AVB support from the platform software.
AVB has been used in vehicles for some time to enable a wide range of premium audio experiences requiring many channels. But historical assumptions about AVB latency have limited its ability to support the high-quality RNC algorithms increasingly required to meet customer expectations of cabin quietness in EVs. This constraint is no longer binding. Low-latency hardware AVB endpoints, together with simple configuration of well-accepted TSN switch features, enables AVB audio latency as low as 200 microseconds, over two switch hops alongside substantial bandwidth of unrelated Ethernet traffic for other vehicle domains. This effectively removes the last substantial barrier to adoption of AVB for all premium vehicle audio use cases.
As automotive OEMs rethink the cabin as a personalised space, assumptions inherited from earlier generations of AVB deserve to be revisited. Ultra‑low‑latency audio for essential RNC no longer requires special, proprietary treatment for audio connectivity, but can be transported on the vehicle’s multi-function network.
About the author:
Peter Hall, Automotive Business Development Manager, Cirrus Logic

Peter Hall has over 20 years of experience across semiconductor design, solutions architecture, and automotive product marketing. His career spans Analog Devices, Intel, and Cirrus Logic, where he has helped build and scale in-vehicle networking, software-defined cockpit, and TSN-based automotive platforms. He holds an MBA from the University of Limerick and a BSc in Music Technology & Audio Engineering from the University of Derby in the UK.