
Sensors are the eyes and ears of a vehicle. They provide essential data that enables real-time perception, decision-making, and navigation. And in the age of ADAS and autonomous vehicles, accurate automotive sensing is important now more than ever.
Sensors in automotive vehicles gather environmental data through LiDAR, radar, cameras, and ultrasonic sensing, enabling the vehicle to interpret what is happening around it. Alongside this external perception, a parallel network of internal sensors continuously monitors the vehicle’s own condition and behaviour. Systems such as tyre pressure monitoring provide early warnings of safety-critical faults, while position sensors track the relationship between the camshaft and crankshaft to ensure precise engine timing. Wheel speed sensors, used by ABS, measure individual wheel rotation to prevent lock-up under braking and to support stable traction and steering control. These are only a handful of the sensors embedded into automotives. They work together in a symphony of understanding and reasoning to create a comprehensive overview of the internal and external environment, making real-time decisions possible.
Yet, a vehicle is only as good as its parts. The lane sensing on my car, for example, is prone to confusion and has even tried to steer me onto the wrong side of the road. So, in today’s world of autonomous and driver-assisted vehicles, safe, accurate sensing is more important than ever.
The challenges of accurate sensing
When it comes to accurate sensing in autonomous and driver-assisted vehicles, the biggest concern is the world in which the vehicle is interacting. Adverse weather conditions can cause sensors to become ‘blind’ – dramatically degrading the performance of the ‘eyes’ of the vehicle.
Edge cases are also a big concern. Edge cases refer to ‘the unknown’. Autonomous systems are trained on vast amounts of data, yet the world is full of unpredictable scenarios. A lack of clear road markings is one such challenge, as is damage to street signs, a misinterpretation of cyclist hand signals, unpredictable animal behaviour, or not recognising smaller animals at all are all areas of concern.
When considering safety, the biggest reliance is on LiDAR, radar, and camera sensors for ADAS and autonomous driving. Yet, engine safety is just as integral. When lives depend on technology, there is no room for error.
Levels of sensing
Typical vehicles, depending on their level of autonomy, have different sensors to achieve different targets. Below is a table created by ChatGPT that compares ADAS systems with autonomous vehicles and the levels of sensors each has.
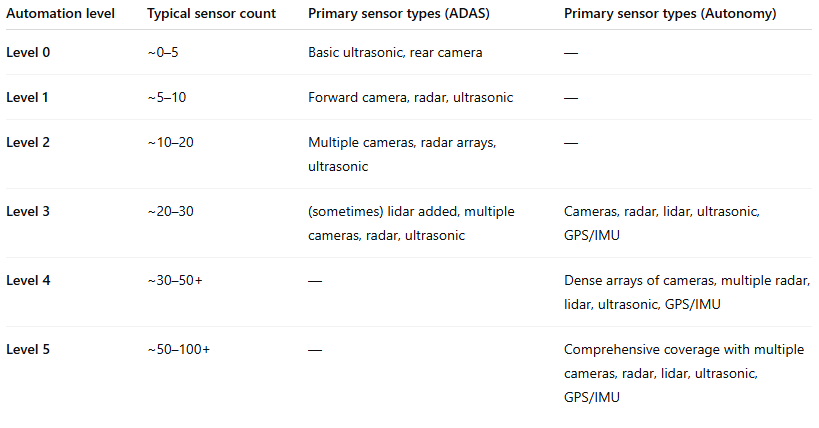
As can be seen, ADAS (Levels 0-2) generally uses cameras, radar, and ultrasonic sensors to support driver assistance, with relatively modest sensor counts. Autonomous vehicles (Levels 3-5) add LiDAR, GPS/IMU, and greater redundancy, increasing the number of sensors needed for full environment perception and safe operation in more conditions.
If there is even a small error or inaccurate data being retrieved by the sensors, it can rapidly cascade into a pretty serious problem, including delayed reactions, incorrect decision-making, and hazardous behaviour. These inaccuracies, at their worst, can be fatal.
A rigorous sensing process
To prevent this, automotive engineers subject their sensors to a rigorous design, development, calibration, and validation process, as well as ongoing monitoring.
Each of these stages is important and feeds into the other. Design is an important step as engineers are not only creating the sensor’s hardware and software, but they are also considering the optimal placement on the vehicle, as the location heavily influences performance, durability, and how effective it is at performing its designated task.
Developing automotive sensors is a multi-phased process that involves understanding the needs of the design, procuring the right technology for the right application, then creating and simulating sensor models, prototyping, and verifying that the physical sensor and related software work as intended in the position before it is integrated into the vehicle’s architecture.
Once the sensor is up to spec and in place, it is then run through a calibration process whereby the vehicle’s cameras and other sensors are precisely aligned and configured so that they operate as intended by the manufacturer’s specifications. This means that the ‘eyes’ and ‘ears’ of the vehicle now function as they should.
Validation is a critical process that ensures the sensor system meets its expected performance in real-world situations. It also ensures that it meets safety standards such as ISO26262 and ISO21448 (SOTIF).
An increasing need for greater accuracy
However, as vehicles are increasingly updated over-the-air and rely on complex sensor networks, maintaining sensing accuracy over time is becoming increasingly challenging.
As autonomous systems become more advanced and interconnected, sensor accuracy is a key target area for engineers.