



Advanced Navigation has successfully demonstrated a breakthrough in underground navigation, delivering high-precision positioning without reliance on fixed infrastructure or GNSS, in Europe’s deepest underground mine in Pyhäjärvi, Finland.
The Hybrid Navigation System, combining a laser velocity sensor (LVS) with the Boreas D90 fibre-optic gyroscope (FOG) inertial navigation system (INS), achieved consistent sub-0.1% navigation error across multiple runs, without relying on any fixed positioning infrastructure, pre-existing maps, or external aiding.
“Unreliable navigation underground isn’t a minor technical constraint – it’s a major operational bottleneck,” said Joe Vandecar, Senior Product Manager at Advanced Navigation.
“Maintaining precision over a 22.9km subterranean course in Europe’s deepest underground mine demonstrates a level of performance that few systems in the world can rival without any prior intelligence of the environment. These results prove we’re one step closer to unlocking scalable underground autonomy.”
Positioning challenges in underground navigation
Navigating the vast subterranean network of the Pyhäsalmi Mine poses significant challenges. Located 1.4km underground with a 63 degree latitude – just two degrees below the Arctic Circle, where traditional systems fail – the mine is completely impervious to GNSS signals. Its repetitive, multi-level tunnel network creates a high risk of visual disorientation, while its metallic ores distort magnetic fields and scatter radio waves.
3D digital twin of Pyhäsalmi Mine in Pyhäjärvi, Finland
To overcome these conditions, mines typically rely on infrastructure-heavy solutions such as ultra-wideband beacons, Wi-Fi, 5G repeaters, or perception-based techniques such as SLAM (simultaneous localisation and mapping) which require cameras. These methods are costly to integrate and maintain, slow to install, and often unavailable in hazardous or unmapped zones where reliable navigation is most critical. Shifting to a truly resilient navigation system, with less dependency infrastructure offers a scalable alternative, enabling reliable navigation even in the most inaccessible or hazardous environments.
Precision with less infrastructure: an inertial-centred architecture
Championing this architecture, the Hybrid Navigation System is centred on Boreas – a world-class FOG INS. Unlike conventional systems, Boreas doesn’t rely on GNSS or magnetic compasses. Instead, it uses ultra-sensitive FOG technology to detect the Earth’s rotation and determine true North, a process known as gyrocompassing to find the vehicle’s direction (heading).

Advanced Navigation Boreas D90 FOG INS
To maintain and enhance this accuracy, the INS is fused with Advanced Navigation’s LVS. Using infrared lasers, LVS continuously measures the vehicle’s true 3D velocity relative to the ground. This real-time data is critical for correcting the gradual ‘drift’ that occurs in standalone inertial systems, enabling the hybrid system to maintain precision over extended distances.

Advanced Navigation laser velocity sensor (LVS)
This integration is made possible with Advanced Navigation’s AdNav OS Fusion software. Using adaptive algorithms, it dynamically weighs the reliability of each sensor in real time. Together, these technologies form a resilient Hybrid System delivering precise, uninterrupted navigational data in extreme environments, without GNSS or fixed infrastructure.
Magnus Zetterberg, Senior Consultant at Combitech, who observed the demonstration, shared: “We were thoroughly impressed by the results the sensor fusion provided. I have used and been exposed to these sorts of sensors in other projects, and nothing has come close to this level of performance. It’s clear the laser velocity sensor is a major key in providing these outstanding results.”
Proven in the 3D depths of Europe’s deepest mine
Selected from over 90 global applicants, a demonstration of the Hybrid Navigation System was livestreamed from the Pyhäsalmi Mine in Pyhäjärvi, Finland, as part of the Deep Mining Open Call under BHP’s Think and Act Differently (TAD) programme.

Advanced Navigation traversing down the Pyhäsalmi Mine in Pyhäjärvi, Finland
Validated across five separate runs in complete isolation from external aids or maps, the Hybrid Navigation System repeatedly achieved an accuracy of better than 0.1% of distance travelled. This performance demolishes a barrier once considered fundamental to underground navigation. View the recorded livestream here.
Runs 1, 2, and 3: accuracy surpassing surface-level GNSS
Over a 6km rough and rugged terrain that extended 400m below the surface, the system achieved a best-case 3D position error of just 0.55m (0.009%), with an average error of 2.83m (0.047%). For context, standard single-band GNSS on the surface typically delivers 2-10m accuracy in open-sky conditions. This system delivered significantly greater precision even within a subterranean labyrinth.

Indicative industry reported positional accuracy of GNSS

“We’ve worked in underground environments for decades. Seeing this level of precision achieved on the first run signals huge potential for safer and more efficient underground vehicle operations,” said Olli Mylläri, Vice President Technology at Normet.
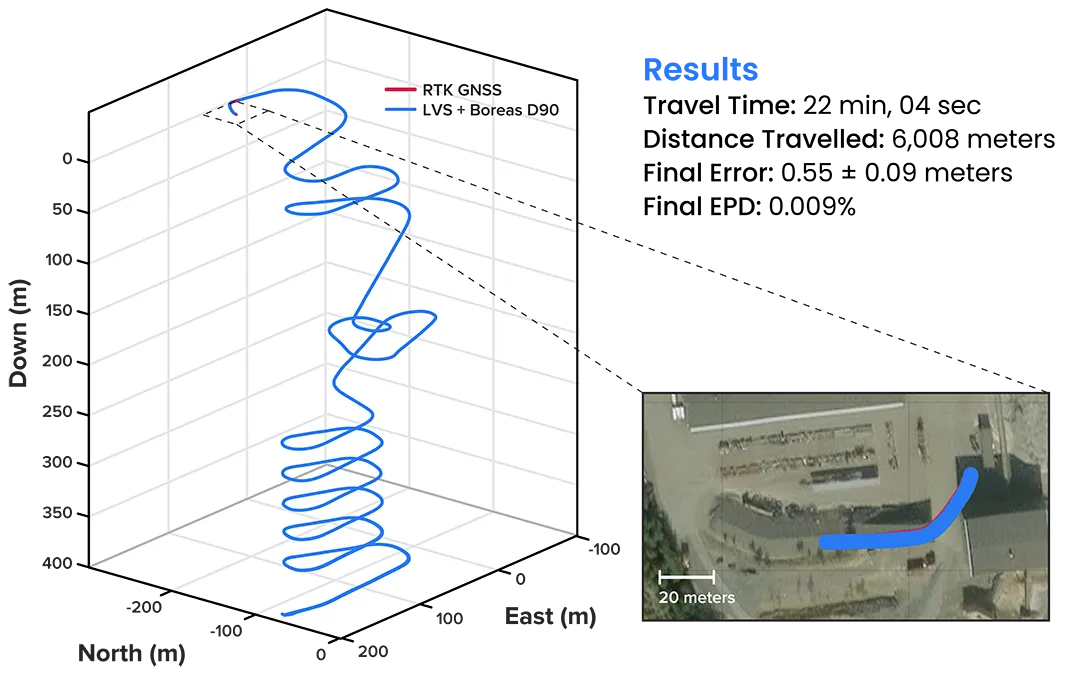
3D navigation trace of run 2 of the repeat surface-to-surface 400m depth tests. This particular run covered 6008 m, with a measured error of 0.55 ±0.09 m for 0.009% error per distance travelled
Run 4: maintaining precision over a half-marathon underground
The system navigated a 22.9km route to a depth of 1,400m – the equivalent of a half-marathon in total darkness. The final position error was 15.9m (0.07%), showcasing its immunity to the drift that plagues other inertial systems.

3D navigation trace of the run down to 1,400m depth. The test traversed a total distance of 22,920m, with a measured final error of 15.98 ±0.09m yielding an error per distance travelled of 0.070%
The descent and ascent paths are coloured differently for disambiguation. During the ascent (light blue), the driver entered a side tunnel at a depth of approximately 1,200m which was not traversed on the descent
Run 5: true “anywhere, anytime” navigation
The graph below illustrates the ultimate test of self-reliance – a true north-seeking initialisation conducted 1.4km underground. Without relying on magnetometers or external aids, the system determined direction (heading) using its built-in gyrocompassing procedure, measuring the Earth’s rotation to establish true north. It then navigated a 1km course with just one metre of error, demonstrating its capability for rapid deployment in the most challenging and unfamiliar terrain.

D navigation trace of the entirely underground run. The test traversed a total distance of 1,067m, with a measured final error of 1.03 ±0.02m yielding an error per distance travelled of 0.093%
A full report has been published here for an in-depth look into the results achieved.
Unlocking scalable autonomy in mining
While mines will continue to use fixed infrastructure, this technology significantly reduces dependency, enabling resilient, high-precision navigation in previously inaccessible or unmapped areas. This performance marks a step change in underground navigation, unlocking new potential for fleet management, predictive collision avoidance, material tracking, and scalable autonomy across mining operations.
“At Normet, we specialise in advanced solutions for underground mining and tunnelling, so we know firsthand how difficult accurate and reliable navigation can be in these environments. Seeing Advanced Navigation’s Hybrid Navigation System deliver consistent positioning with minimal infrastructure deep within the Pyhäsalmi Mine was remarkable. It’s a powerful step forward for automation and safety in the underground space,” shared Olli Mylläri, Vice President Technology at Normet.
In today’s dynamic operational environments, relying on a single navigation technology is no longer viable. Robust navigation demands a layered, inertial-first and multi-sensor architecture – held together by intelligent software – that can adapt and scale to meet the unique demands of each operation.
“Ultimately, this vehicle-based, inertial-centred architecture provides the resilient foundation required for the mining sector to achieve its long-term goal: efficient autonomous ore extraction at depths hostile to human activity,” added Joe Vandecar, Senior Product Manager at Advanced Navigation.
The Hybrid Navigation System is set for commercial release in late 2025.